跳跃是自然界生物的一种非常有效的运动手段,可以在瞬间穿越中长距离,以实现捕猎及逃避被猎捕的目的。自然界生物跳跃的机理主要有两种,长腿动物(比如袋鼠和青蛙)主要依靠杠杆作用,使它们能够用较少的力量跳跃同样的距离;一些短腿或无腿动物(比如果蝇幼虫和跳蚤)依靠快速弹射动作释放储存的能量来实现跳跃;还有一些昆虫(比如蚱蜢和沫蝉)同时利用这两种设计理念(图1)。其中,磕头虫是一种有趣的昆虫,当被人类捉住时,它们会不断地用力向前倾斜头部,仿佛在进行一场无声的“磕头”仪式恳求释放。原来磕头虫的前胸背板具有非凡的灵活性。在其前胸腹板的中央稍后部位,有一个尖锐的刺状结构。每当它的头部与胸部向腹部弯曲时,这个突出的部分就会巧妙地嵌入到胸腹前缘的沟槽中。当它再次挺胸时,突出体从沟槽中弹射出来,撞击地面,产生的后冲力足以使其弹跳起来挣脱。由此可见,磕头虫那看似虔诚的“磕头”行为,并非出于对人类的求饶,而是一种本能的自我防卫机制,用以摆脱束缚。如视频1所示当将它肚皮朝上放在地面,他会来一个鲤鱼打挺弹射出去,挣脱捕食者。
受这些自然界跳跃机制的启发,科学家们利用新型材料和复杂的结构设计,模仿生物系统中的快速能量存储和释放过程,制造出了多种创新的跳跃机器人。其中,光响应驱动器具有成本效益高、无线驱动能力强和响应速度快等优点而受到广泛关注。偶氮苯液晶(LCs)因其偶氮苯介质的反-顺式光异构化而成为一种有前途的光响应材料。基于偶氮苯的致动器已从基本的弯曲、扭转运动发展到在微型机器人和液体运输中的新型应用。但是,基于偶氮苯的光致动器的高效跳跃行为仍相对缺乏探索。
中国科学院理化技术研究所江雷院士、王京霞研究员团队在前期的工作中,通过设计制备一面为光响应偶氮苯均质膜,一面为偶氮苯反蛋白石的具有Janus结构的光响应驱动材料,实现了在液相中的光驱动性能研究;利用光化学/光热模式的协同驱动产生多个驱动方向,具有更大的驱动力 (Adv. Funct. Mater. 2021, 31, 2105728; ACS Appl. Mater. Interfaces 2021, 13, 12383-12392; ACS Appl. Mater. Interfaces 2022, 14, 1727-1739)
近日,该研究团队受具有具有特殊卡扣结构的磕头虫启发,它弯曲身体积蓄弹性势能,然后身体猛然伸直释放能量实现瞬时跳跃,设计了类磕头虫卡扣结构的光跳跃材料:通过选用具有热弛豫时间短的偶氮苯分子,制备具有展曲(splay)取向的偶氮苯膜材料,开发了一种Janus光驱动跳跃软机器人,在紫外线照射下,它能在66.8 ms内完成一次完整的跳跃,其跳跃高度可达35个体长(BL),起飞速度为670 BL/s。所制备的Azo-LCN 薄膜应力为36.27 兆帕,应变为6.5%,可循环使用50 次以上。这项研究将有助于设计新型致动器和拓宽偶氮苯致动器的应用领域,可能为探索、搜索和救援等新应用提供思路。所采用的偶氮苯分子(命名为Azo-A)具有较短的热弛豫时间(其在90 ℃ 时的半衰期小于1 s),能够在光的作用下快速弯曲和恢复,从而能产生快速自主恢复的连续跳跃行为(视频2)。样品的splay取向是将样品的一侧分子采取平行取向(PA)而另一侧分子采取垂直取向(VA)的模式,从而使样品在光刺激下产生向PA侧的净弯曲变形。
相关研究成果以Click-Beetles-inspired Light-driven Continuous Jumping Robots Based on Janus Azobenzene Polymer Films为题发表在Advanced Functional Materials上。该文章通讯作者为王京霞研究员。中国科学院理化所博士生况真欣为文章第一作者,中国科学院理化所江雷院士为本研究提供了专业指导和帮助。研究得到了国家自然科学基金项目(项目编号:52373001, 51873221, 52073292, 51673207, 51373183, 21988102, 22205246)及中荷国际合作项目(1A111KYSB20190072),陕西省化学与生物学基础科学研究项目(23JHQ079),西安理工大学科研基金(109-451023008)等的资助支持。
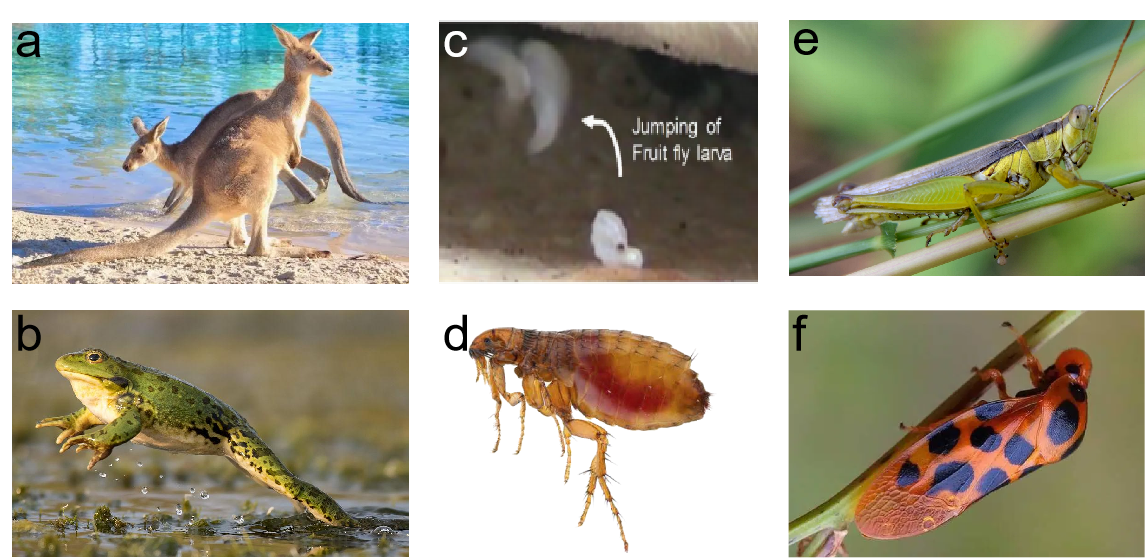
图1. 自然界中跳跃的动物。(a) 袋鼠,(b) 青蛙,(c) 果蝇幼虫,(d) 跳蚤,(e) 蚱蜢,(f) 沫蝉
视频1.磕头虫弹跳视频。
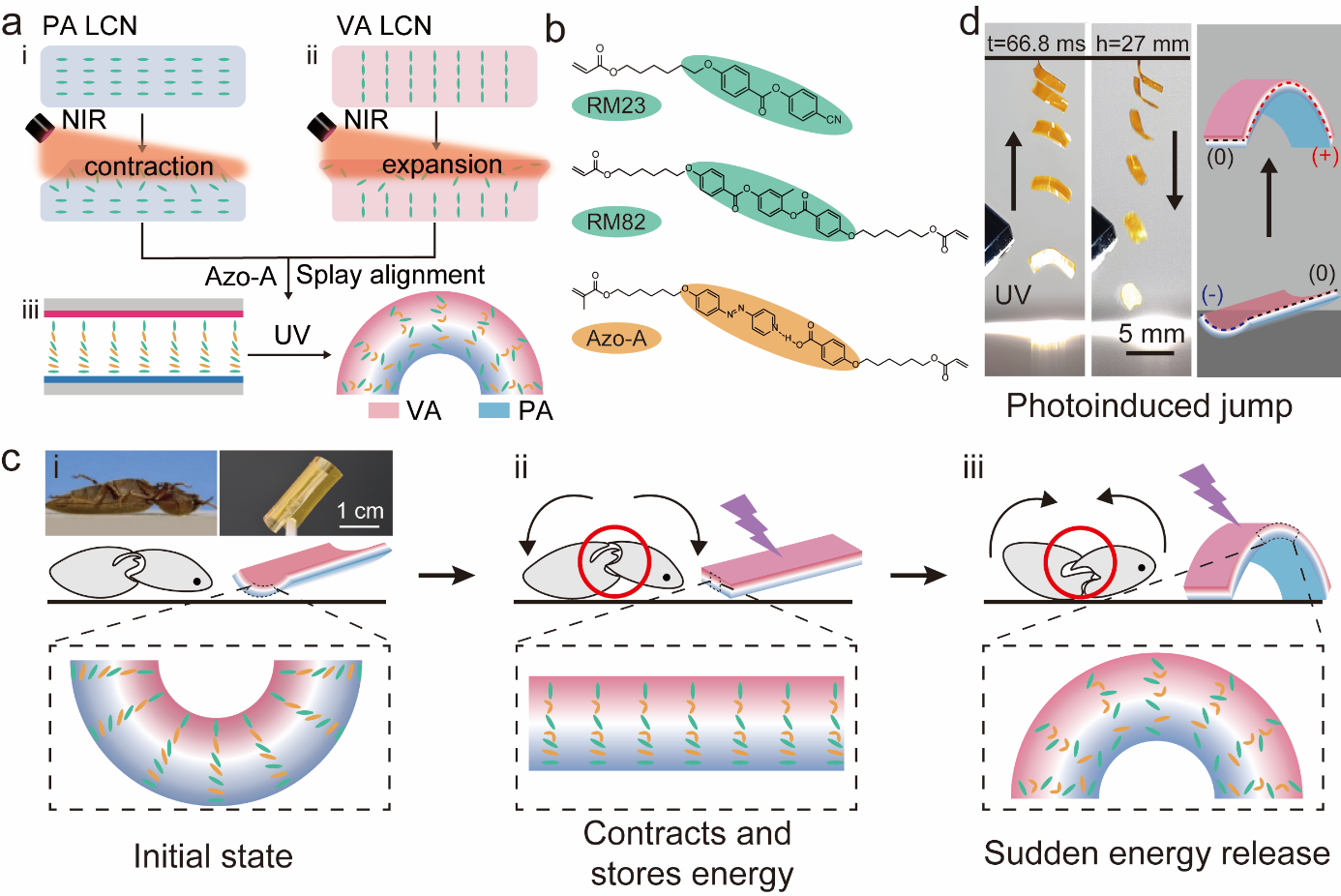
图2. (a) 如图1a所示,带有PA(i)或VA(ii)的液晶聚合物网络(LCN)在热刺激下会发生收缩或膨胀变形。制备的样品具有展曲取向(iii),材料的一侧为PA,另一侧为VA。(b) RM23、RM82和Azo-A的分子结构。(c) 磕头虫的跳跃过程和相应的Azo-LCN 薄膜的跳跃示意图。 i) 初始状态(薄膜向 VA 侧微微弯曲);ii) 骨骼肌缓慢地将弹性能量储存在身体和胸腔铰链中,使身体处于弯曲位置(“锁定 ”位置)(内部微变形导致的向PA侧的宏观变形优先使薄膜摆脱初始形状,变得平整。);iii) 当触发时,闩锁被松开,甲虫的身体迅速展开(持续的紫外线刺激照射使薄膜向PA侧的变形突破初始状态,累积的变形被均匀释放,向PA侧产生较大的弯曲变形,此时产生的力与桌面相互作用,使其跳起)。(d) Azo-LCN完整跳跃/下落过程的详细照片和示意图(含曲率变化),薄膜在紫外线照射后66.8 ms内跳起27 mm高。
视频2.Azo-LCN膜的弹跳视频
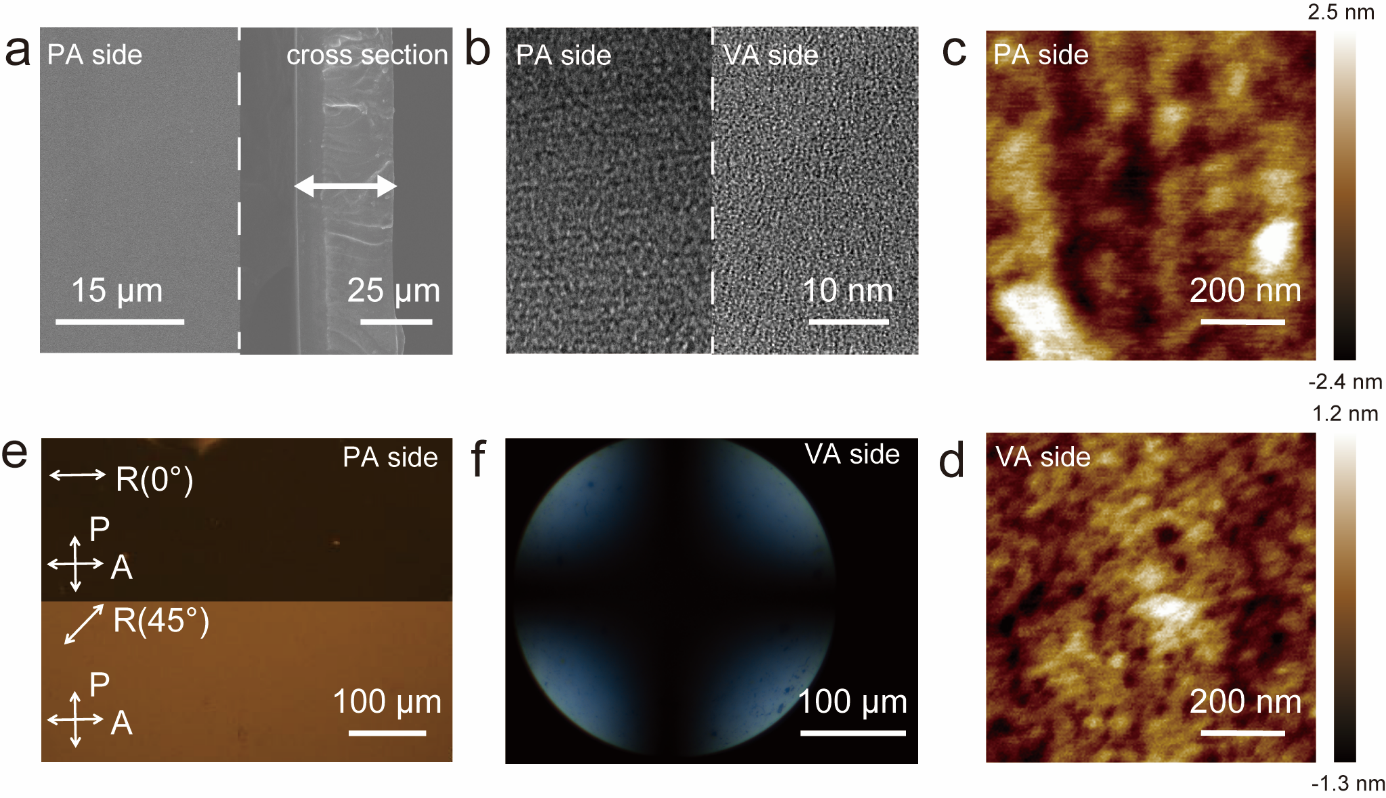
图3. (a)薄膜的扫描电子显微镜图像,表面顶部扫描电子显微镜(左)显示其表面光滑无裂纹,截面扫描电子显微镜(右)显示其厚度为30 μm。(b) 薄膜的TEM图像,聚合物的PA面(左)与VA面(右)相比,显示出明显的取向。薄膜PA面(c)的原子力显微镜图像显示了取向方向,薄膜VA面(d)没有明显的取向迹象。(e) 薄膜PA的POM结果,0°和45°观察结果显示出明显的明暗变化,表明取向情况良好。(f) 锥光模式下的POM图像,显示出代表垂直取向的马耳他十字图像。
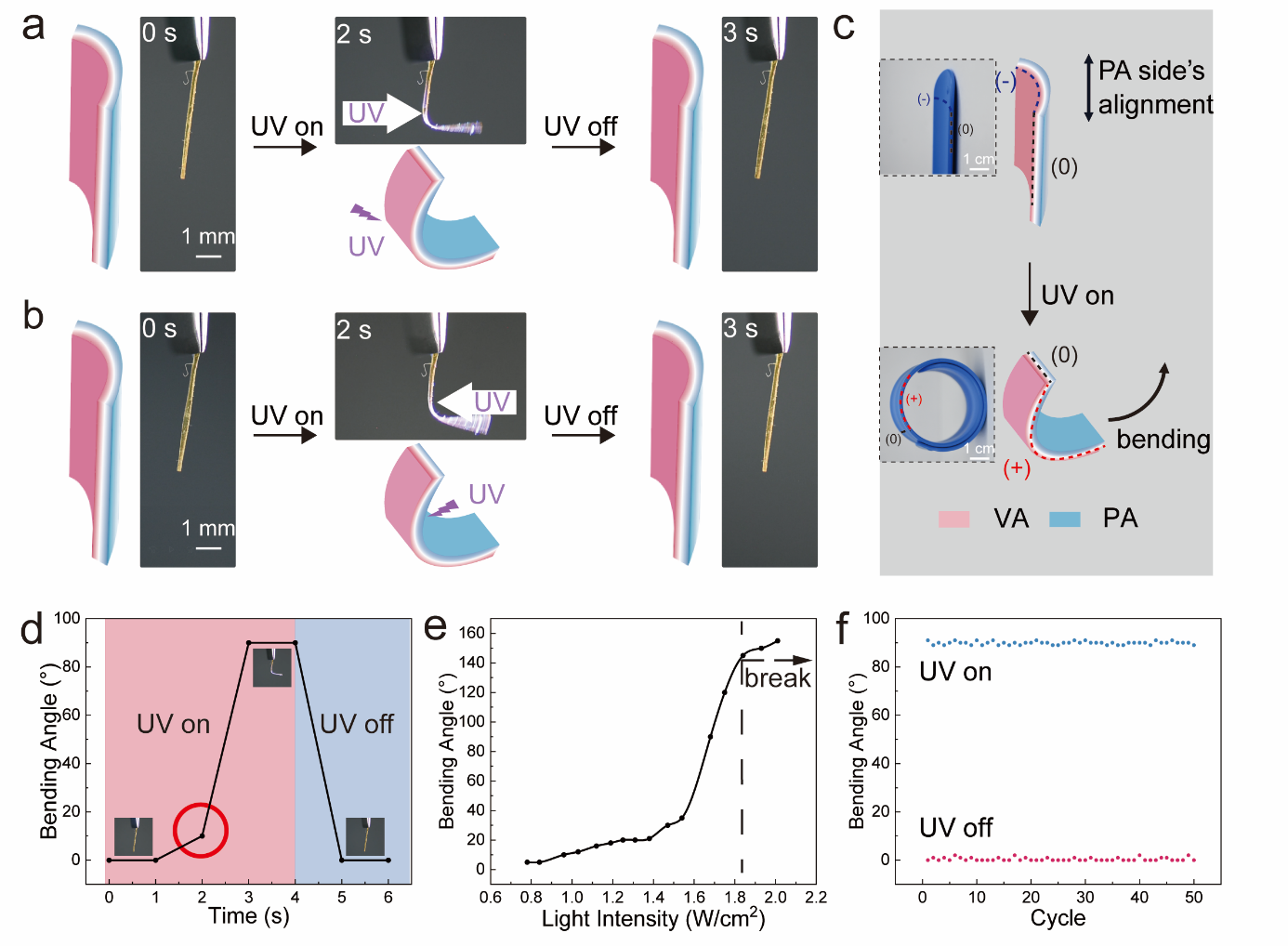
图4. (a, b)紫外光从VA(a)或PA(b)侧射入时样品驱动的示意图和照片,均是薄膜向 PA 侧弯曲90°。光线熄灭后,样品恢复到初始状态。(c) 薄膜光驱动前后结果示意图(带曲率)。插图是巴掌手镯在受刺激变形前后曲率变化的照片。(d) 薄膜驱动器弯曲角度随时间变化的数据,显示薄膜在光照射3秒内发生了90° 的弯曲变形。关灯后,薄膜的弯曲变形在1秒内恢复。(e) 薄膜驱动器的弯曲角度随光照强度变化的示意图,图中显示,在光照强度较低时,仅会产生较小的变形,而当光照强度大于1.75 W/cm2时,则会产生快速、巨大和强烈的变形。当功率密度超过1.85 W/cm2时,光源会过热并损坏薄膜,但薄膜仍能正常工作。(f) 薄膜致动器的循环测试结果,可反复循环100 次而不会产生疲劳
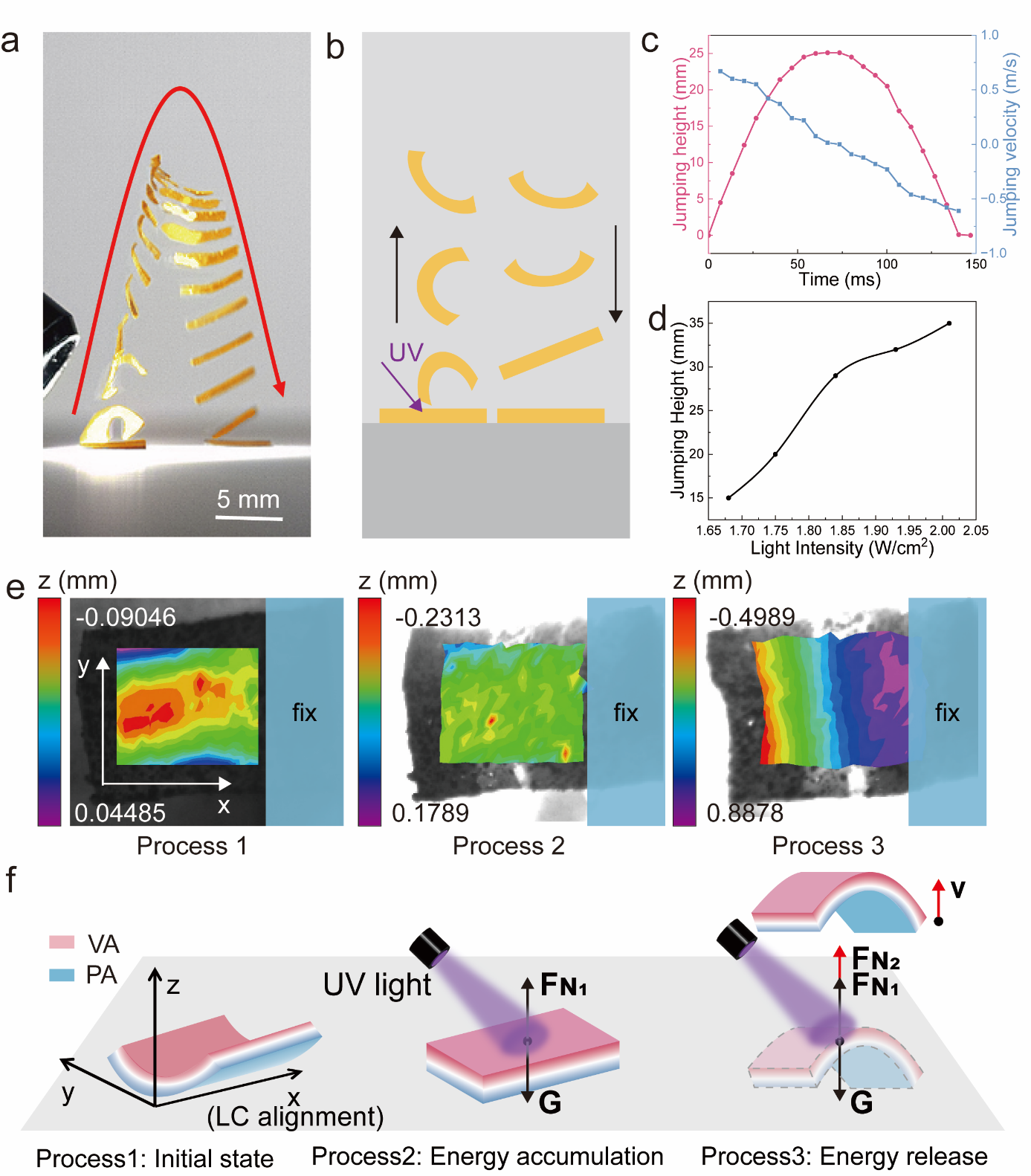
图5. (a) 膜跳/落全过程的实际过程。(b) 膜跳跃完整过程示意图。(c) 膜跳跃过程中高度和速度的变化,最大起飞速度可达 670 毫米/秒(670 BL/秒),最大跳膜高度为 23.1 毫米(23.1 BL)。(d) 跳跃高度随光照强度的变化表明,跳跃高度与光照强度成正比,但光照强度超过1.85 W/cm2的过热光源会损坏膜,但此时膜仍能跳跃。(e) 实时三维薄膜致动变形监测,颜色和数据说明了z轴上的形状变量,过程可分为三个阶段。从过程1的颜色和数据可以看出薄膜向VA侧变形并绕x轴弯曲时的初始形状,展示了用于储能的结构变形。过程2的颜色和数据显示,薄膜在紫外线照射下开始向PA侧弯曲变形,这涉及到能量存储,导致应力变化。过程3的颜色和数据显示,在紫外线的持续照射下,薄膜开始向PA侧变形,并绕y轴弯曲。其原因是薄膜中储存的能量超过临界值后突然释放,导致薄膜弹向空中。(f) 通过观察薄膜的行为分析跳跃原理。紫外线提供能量,能量储存在Azo-LCN带中。当点光源照射薄膜时,会产生向下的膨胀力。由于初始形态的原因,薄膜有一个变形能量阈值。当储存的能量达到阈值时,会突然释放,产生一个快速向上的合力,导致薄膜跳跃
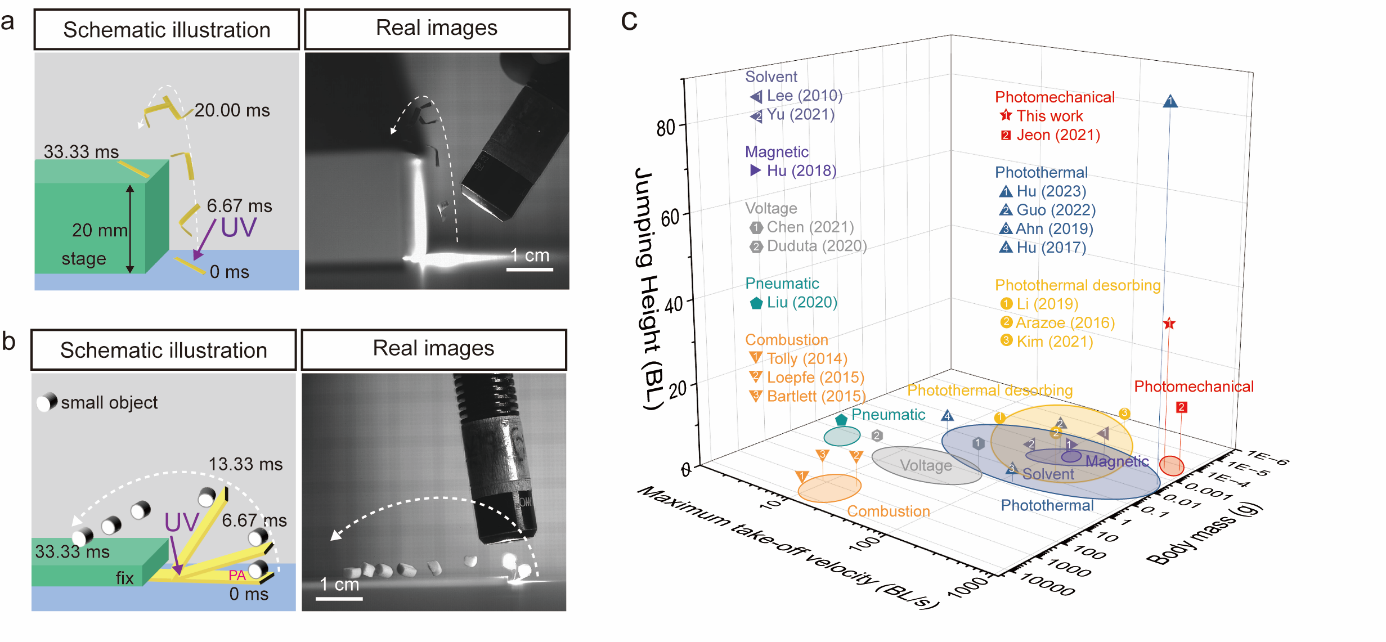
图6. (a) 在紫外线(1.75 W/cm2)的刺激下,条带机器人可以通过跳跃跳上20 mm高的楼梯,高速摄像机对此进行了记录。(b) 在高速摄像机的记录下,该条纹机器人可以模拟投石器,并成功投掷出一个小物体。(c) 本文使用的薄膜跳跃高度和跳跃速度与文献比较,本研究提出的机器人可跳跃至35 BL的高度,跳跃速度可达0.67 m/s
原文链接:https://onlinelibrary.wiley.com/doi/full/10.1002/adfm.202421111
新闻中心